Follower Arm Overview
Overview
This document provides complete instructions for using OpenBot Giraffe Follower Arm. It includes detailed assembly instructions for the Configuring the Servos, wiring to the servo Bus, calibration procedures, and steps to verify functionality.
A. Introduction
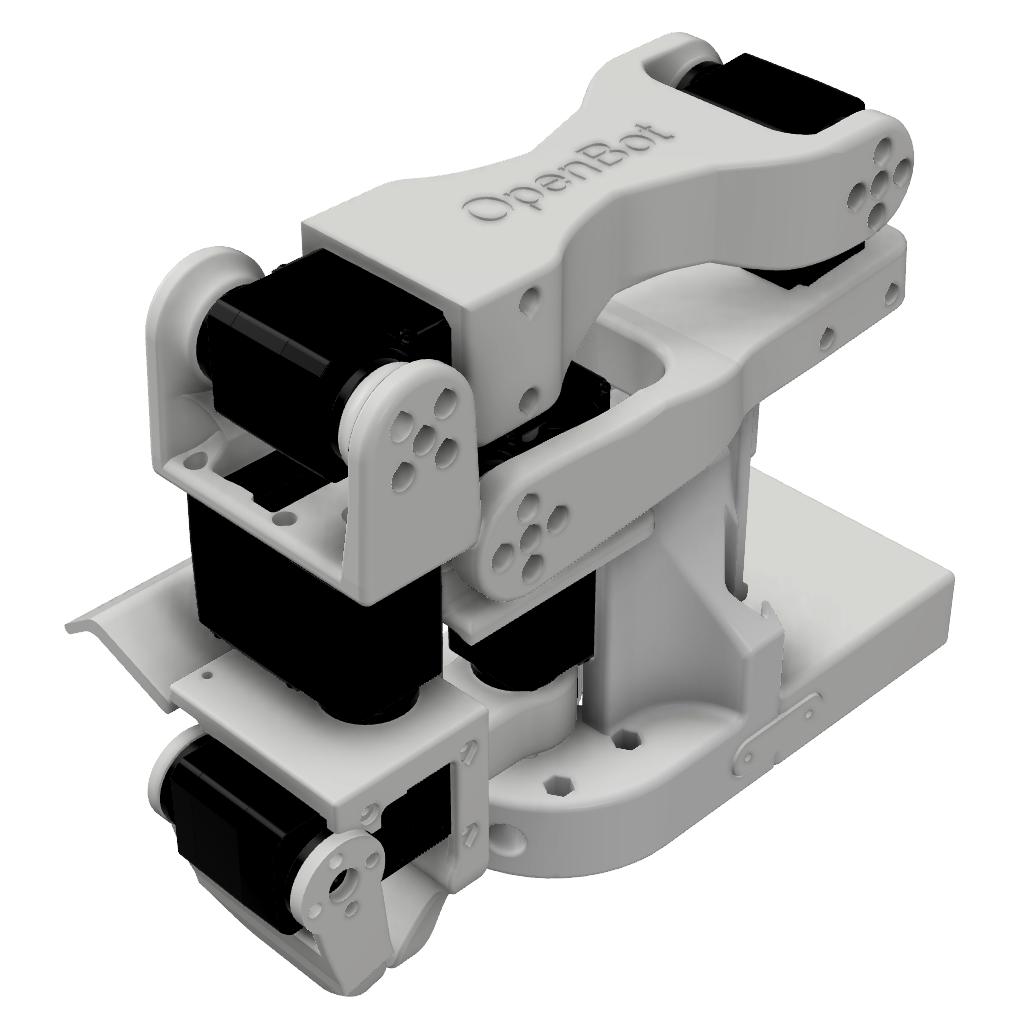
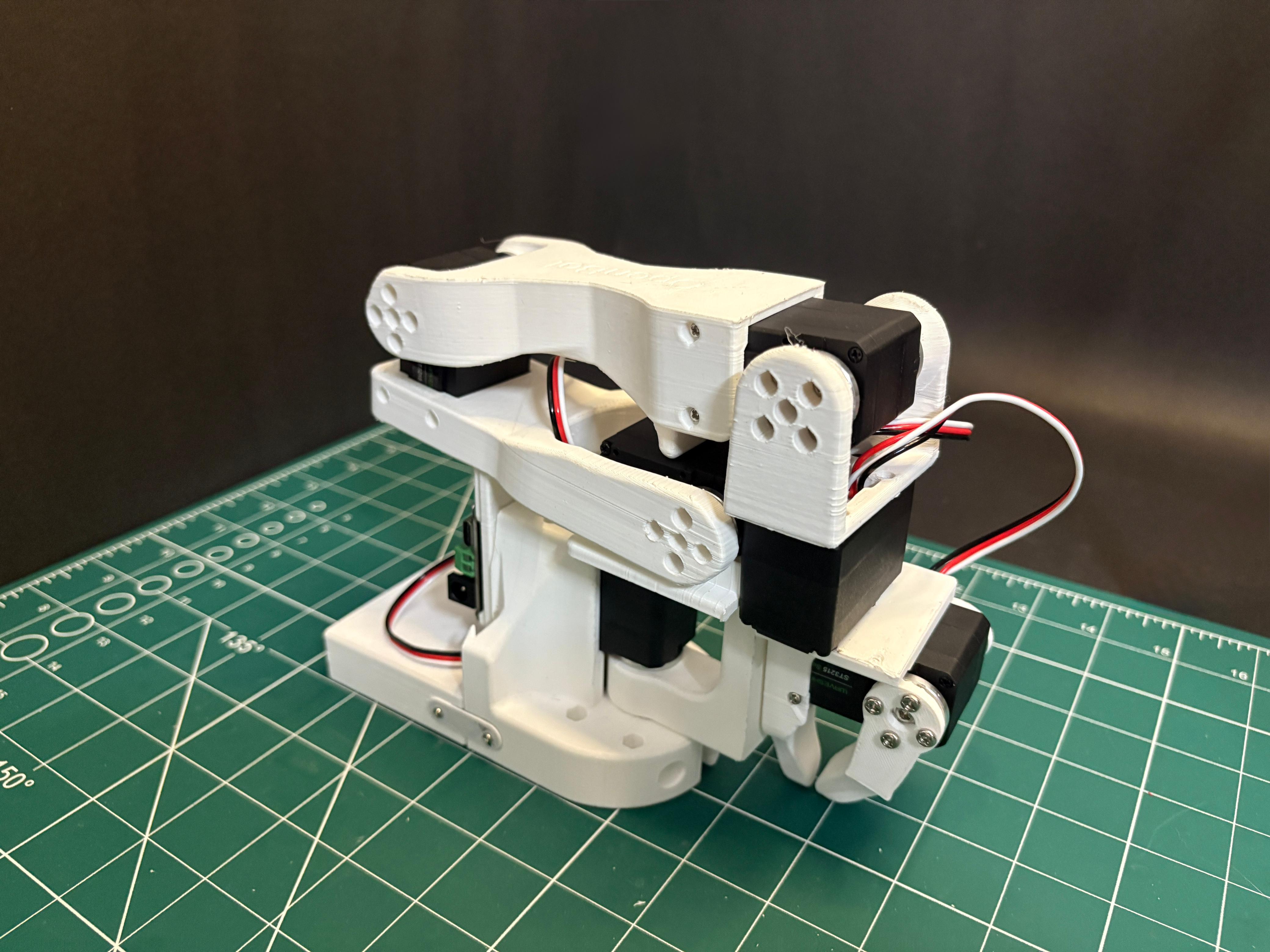
The Giraffe Follower Arm is an affordable, open-source 5-DOF robotic manipulator designed for hobbyists, educators, and researchers. Built around a lightweight, 3D-printed frame and high-torque Waveshare ST3215 servos, Giraffe offers a perfect balance of robustness, precision, and affordability. The advantages include:
- Easy Assembly: A comprehensive yet small Bill of Materials (BOM) with a detailed assembly guide.
- LeRobot Integration: Allows you to teleoperate and teach Giraffe with our servo-less Leader Arm.
- ROS2-Native Control: Pre-configured packages for simulation, visualization, trajectory planning, and hardware bring-up.
- Sensory Extensibility: Optional integration with Intel RealSense off-the-shelf webcams for eye-in-hand or eye-to-hand setup configurations.